Qguar YMS – Smart Management of Loading, Unloading, Parking Areas and Logistics
Qguar YMS gives you complete control over the movement of vehicles and people across your industrial or logistics site. Automate check-in, scheduling, and real-time tracking of all yard activities—reduce bottlenecks and boost site security.
COMPLETE CONTROL OF LOGISTICS FLOWS – QGUAR YMS FOR MODERN TERMINALS AND LOGISTICS CENTERS
Qguar YMS (Yard Management System) is an advanced software solution designed for efficient management of all vehicle, personnel, and resource flows within logistics centers, industrial facilities, warehouses, and terminals. The system enables automated registration and tracking of entries and exits, optimal allocation of vehicles and resources, as well as streamlined planning and control of loading, unloading, and on-site activities.
By integrating with your existing ERP, WMS, and TMS solutions, Qguar YMS provides complete real-time visibility of all logistics operations, reduces bottlenecks, maximizes resource utilization, and elevates security to the highest industry standards. Digitalize your processes, accelerate goods flow, and ensure maximum efficiency across your logistics chain with Qguar YMS.
Key Features of the Qguar YMS Logistics Management System
Digitalize and automate all processes related to vehicle, personnel, and resource movement across terminals, warehouses, or logistics centers—with seamless integration to ERP, WMS, and TMS solutions.
Optimize goods flow, reduce bottlenecks, and enhance security—manage all logistics operations in real time with an advanced YMS platform.
Qguar YMS – Advanced Management of Logistics and Transportation Operations
Feature
Description
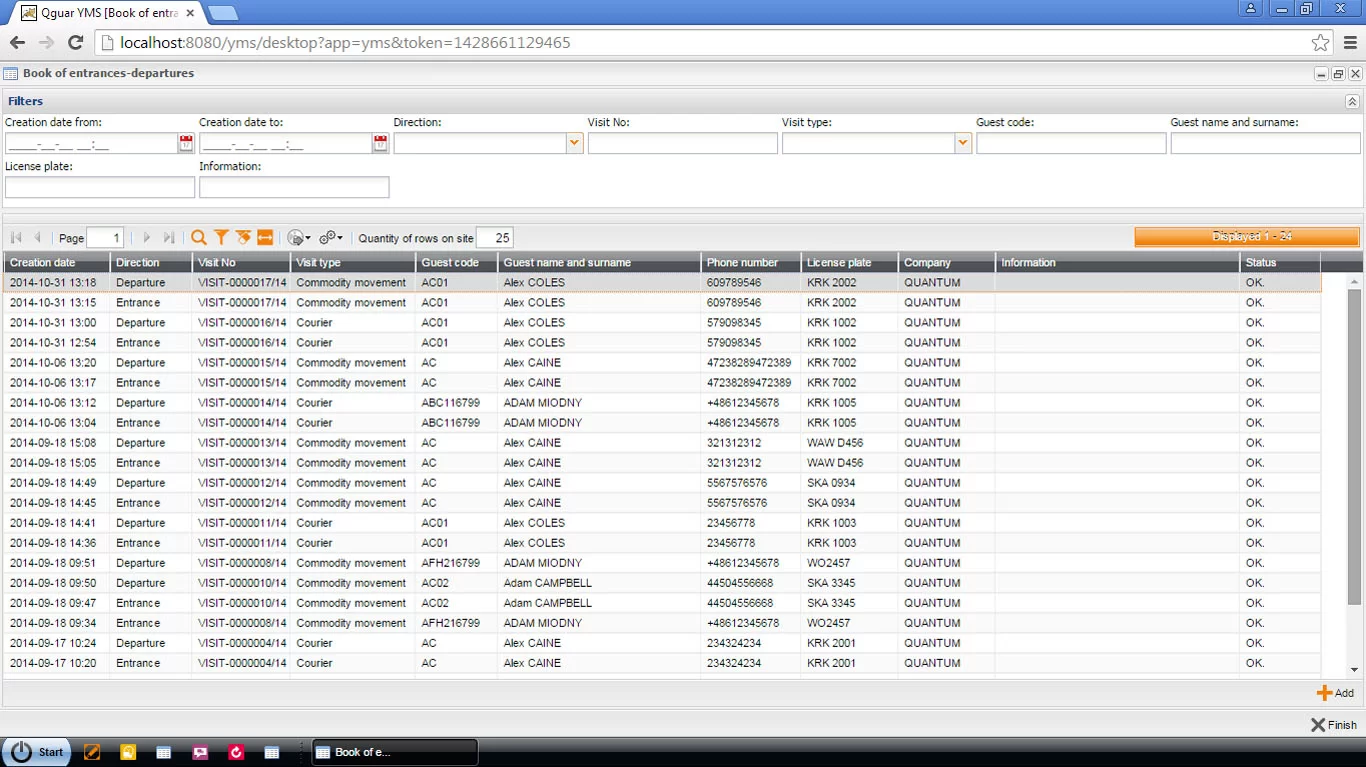
Vehicle and Visitor Tracking & Registration
Automated recording of all vehicle and personnel entries and exits at the logistics site, with precise time and location tracking.
Loading & Unloading Scheduling and Control
Accurate scheduling of dock appointments, automated queue management, and minimized delays for smoother operations.
Integration with ERP, WMS, and TMS Systems
Flexible data exchange with business and logistics solutions for fully connected processes and streamlined information flow.
Parking and Capacity Management
Optimize parking space utilization and resource allocation, manage queues, and intelligently assign parking to drivers and visitors.
Security and Access Control
Comprehensive access control, movement tracking, and real-time monitoring of all activities for asset and process security.
Analytics and KPI Reporting
Detailed statistics on resource utilization, processing times, on-time arrivals, and other key performance indicators.
Automated Communication and Notifications
Send alerts to drivers and staff via SMS, email, or digital boards—ensuring faster response and accurate information.
Advanced Capabilities of Qguar YMS – Complete Digital Control of Logistics Processes
Qguar YMS is far more than just a vehicle tracking tool it’s a comprehensive solution for digitalizing and automating every logistics process across industrial plants, warehouses, and logistics centers. The system enables automated identification of vehicles and visitors (using RFID, barcodes, or smart cards), streamlined scheduling for loading and unloading, advanced parking management, and precise access control throughout the facility.
Users benefit from real-time analytics and advanced reporting covering everything from the current status of all resources, dock and gate utilization rates, to on-time arrivals and operation durations. Qguar YMS automatically sends notifications to drivers via SMS or email, while the entire logistics workflow can be reviewed and analyzed through historical data and visual process tracking.
One of the system’s greatest strengths is its seamless integration with ERP, WMS, TMS, and other enterprise solutions, ensuring uninterrupted information flow and complete synchronization of all critical processes. These features make Qguar YMS the perfect choice for companies aiming to elevate their logistics management, security, and efficiency to the highest standards of modern industry.
Key features:
Automated Vehicle Registration and Tracking:
Qguar YMS enables automated logging of all vehicle and visitor entries and exits, with precise tracking of each visit’s location and statu whether by RFID, barcode, or manual check-in.
Scheduling and Optimization of Loading and Unloading:
Accurate appointment scheduling and dock assignment ensure a steady vehicle flow, reduced waiting times, and maximum utilization of logistics capacity.
Parking and Capacity Management:
Intelligent parking management, queue control, and automated space allocation contribute to better organization and reduced congestion on-site.
Digital Access Control and Security:
Comprehensive monitoring of personnel and vehicle movements, automatic issuance of temporary IDs, and full activity tracking for enhanced security and transparency.
Automated Notifications and Communication:
Notifies drivers and staff via SMS, email, or information displays—ensuring timely instructions, fewer delays, and increased productivity.
Integration with ERP, WMS, and TMS Systems:
Qguar YMS enables seamless two-way data exchange with business and logistics platforms, supporting fully connected and uninterrupted information flows.
Real-Time Analytics, KPIs, and Reporting:
Detailed statistics on resource utilization, average processing time, arrival and dwell status, and other key performance indicators all available through flexible, real-time reports.
Historical Reconstruction and Process Analysis:
The system provides full insight into the history of all visits, events, and operations, making it easy to identify bottlenecks and drive continuous logistics process improvement.
Priority Management and Task Automation:
Automatic service sequencing, priority rule definitions, and flexible exception handling enable more efficient yard and terminal management.
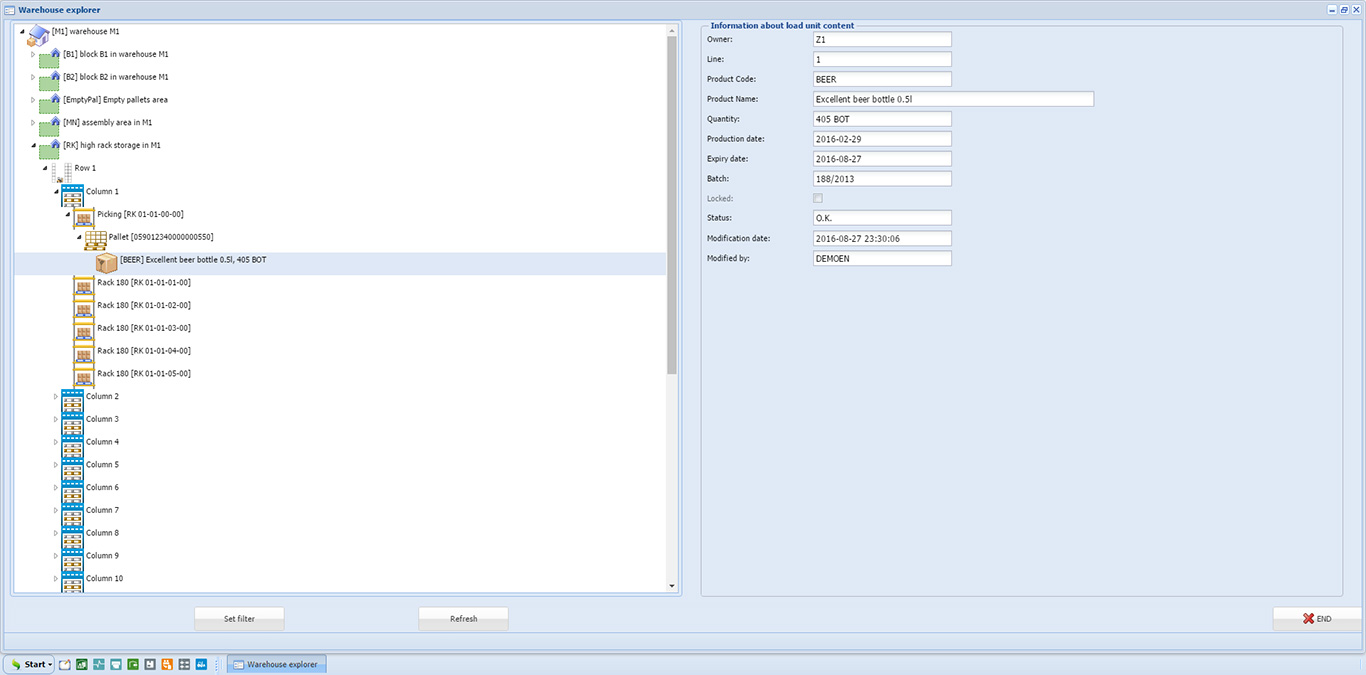
Flexible Topology Models and Scalability:
Supports multiple sites, warehouses, and complex facilities the system easily adapts to organizations of any size or industry.
Advanced Technology and Open Architecture:
Connects with barriers, scales, signaling devices, and more—with support for both standard and custom interfaces.
Increased Efficiency and Cost Reduction:
Qguar YMS shortens processing times, eliminates unnecessary delays, boosts resource utilization, and reduces operational costs through digitalization and logistics automation.
Frequently Asked Questions about Qguar YMS
Find answers to the most common questions about digitalizing, automating, and optimizing yard and logistics flow management with Qguar YMS.
Qguar YMS is ideal for companies with high vehicle turnover, warehouses, logistics and distribution centers, industrial sites, customs zones, and terminals. It supports any location that requires efficient control over vehicle and personnel movement.
Every visit, driver, and vehicle is registered upon entry and exit, with the system automatically logging all activity and movements in the yard area. This significantly reduces the risk of theft or unauthorized access and enables fast incident response.
Yes. Qguar YMS enables precise scheduling of arrivals, automated assignment of time slots and docks, and intelligent queue management, eliminating bottlenecks, unnecessary waiting, and optimizing the flow of goods.
Identification can be performed via RFID technology, barcodes, smart cards, or standardized site signage. The system allows accurate tracking of every vehicle and person within the logistics facility.
Yes. Qguar YMS keeps a complete record of all visits, drivers, vehicles, and activities, enabling in-depth dwell analysis, bottleneck identification, and process optimization for the future.
Yes. Communication with drivers can be carried out via SMS, email, LED panels, or information displays, depending on the solutions deployed at the facility.
By automating many routine tasks and streamlining logistics flow, the system reduces required staffing levels, shortens processing times, and optimizes resource usage—directly impacting cost reduction.
The system can be integrated with scales, barriers, signaling devices, information boards, mobile devices, HMI screens, RFID and barcode scanners, enabling full digitalization of all yard processes.
Dock and parking assignments can be manual, semi-automatic, or fully automated based on set rules, priorities, and current capacity. The system ensures optimal utilization of all resources.
Yes. The system logs and analyzes the timeliness of driver and vehicle arrivals, enables recognition of punctual deliveries, and improves supply chain discipline.
Yes. Qguar YMS features both standard and custom interfaces for integration with most ERP, WMS, and TMS platforms, ensuring unified data flow and complete digital connectivity.
Optimizes vehicle flow and reduces congestion on-site
Increases security and control of all movements
Enables detailed tracking and activity analysis
Reduces costs and manual operations
Improves transparency and efficiency across the supply chain
Supports faster and easier decision-making through real-time analytics and reporting
Qguar YMS is an advanced software system that can be seamlessly implemented in any company, regardless of size, industry, or the complexity of logistics operations. It is especially recommended for sites with high volumes of vehicle traffic, such as logistics centers, industrial facilities, warehouses, and distribution or transport terminals. The system enables optimal management of arrivals, waiting queues, and allocation of vehicles to loading/unloading docks or parking areas, significantly reducing congestion and speeding up cargo handling.
Qguar YMS is the ideal solution for companies that need real-time registration and tracking of all external vehicles, visitors, and logistics assets whether for safety, recordkeeping, or regulatory compliance. With advanced features for automated identification and communication (RFID, barcode, SMS/email notifications), the system provides complete transparency over all logistics activities at your site.
Thanks to its flexibility, Qguar YMS is an excellent choice for organizations with multiple geographically dispersed sites or complex logistics zones, where precise driver guidance and constant communication throughout every stage of the visit are essential. The system allows for easy management and integration of information from each location within a single, unified platform.
It is particularly valuable for companies facing a limited number of docks or gates compared to traffic volume, as it enables intelligent prioritization, timely communication with drivers, and optimal utilization of all resources. Qguar YMS provides both management and customer service teams with real-time insight into all logistics processes, streamlining decision-making, enhancing customer experience, and elevating service standards across your operation.
Overview of basic system features:
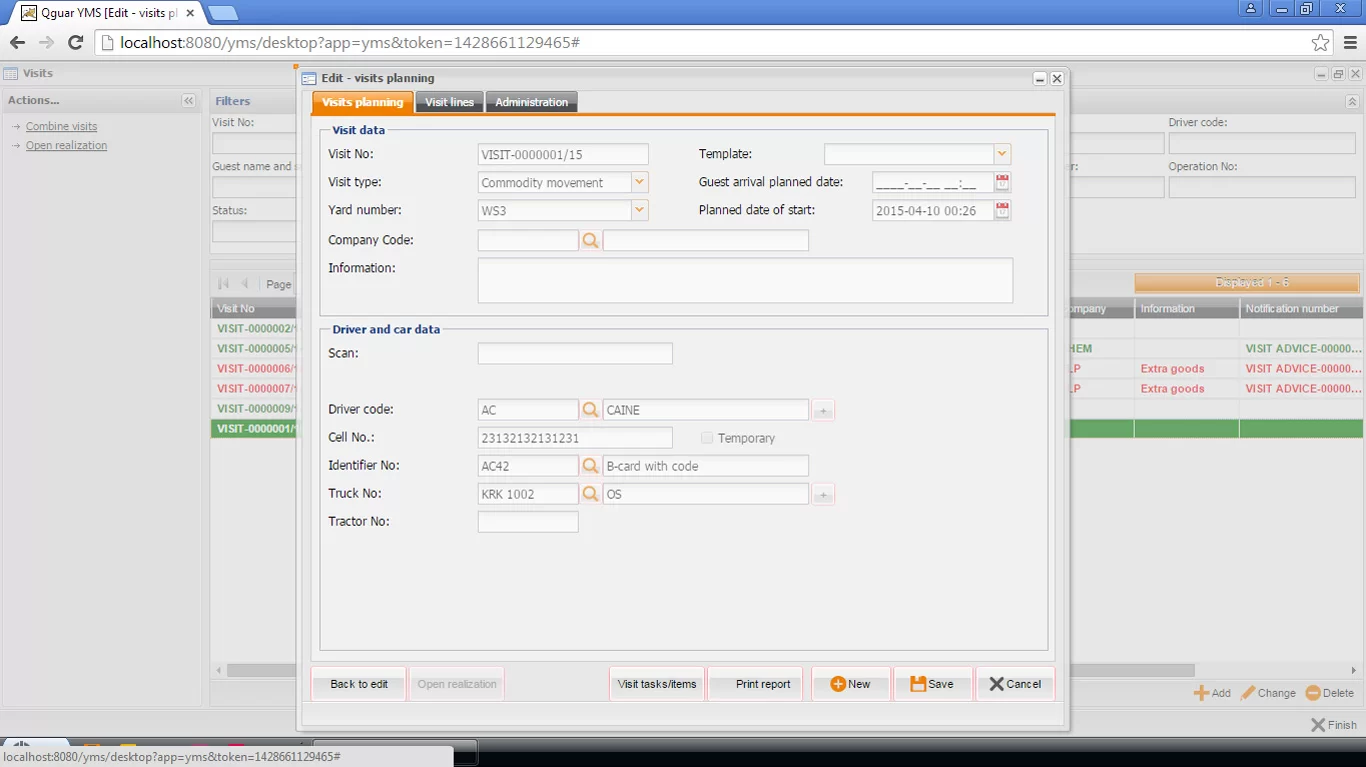
Yard operations schedule
Loading and unloading planning
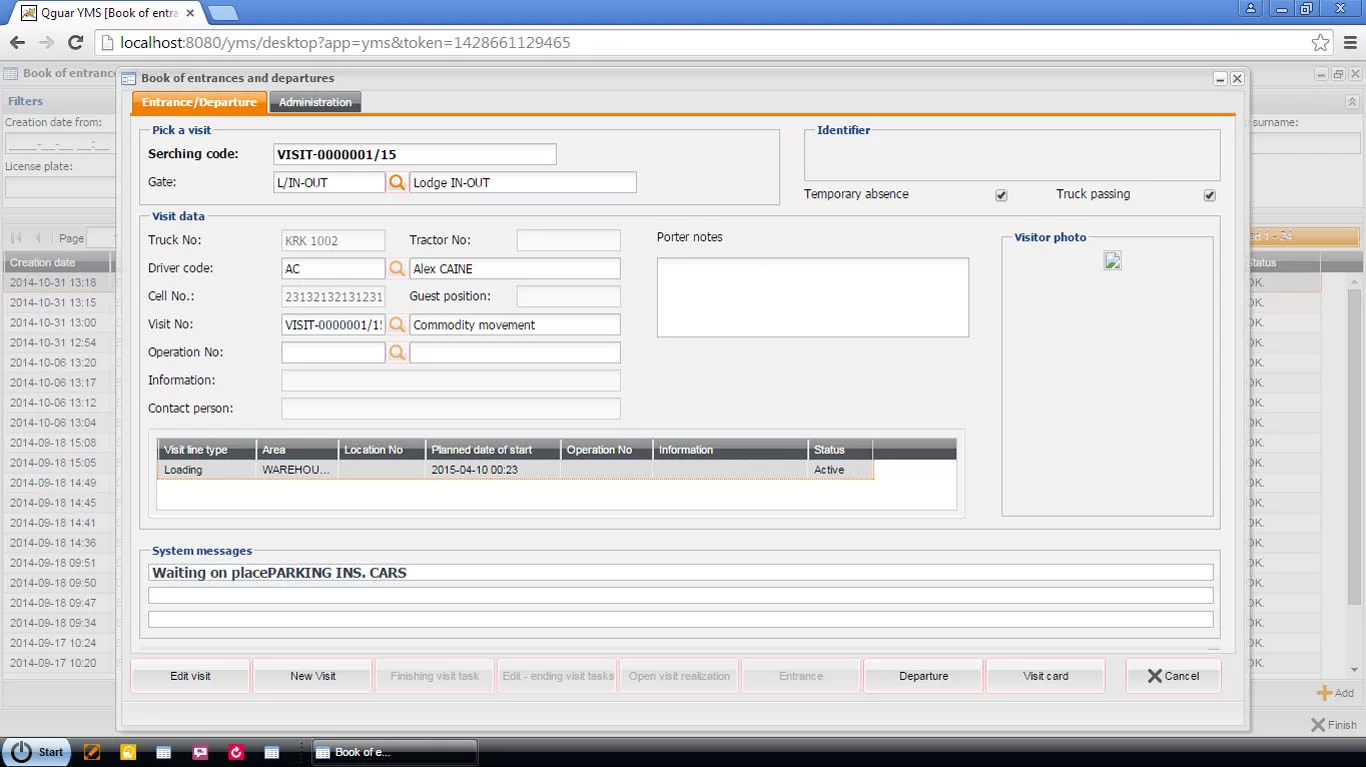
Parking and pedestrian traffic management
Traffic planning
Operation time measurement
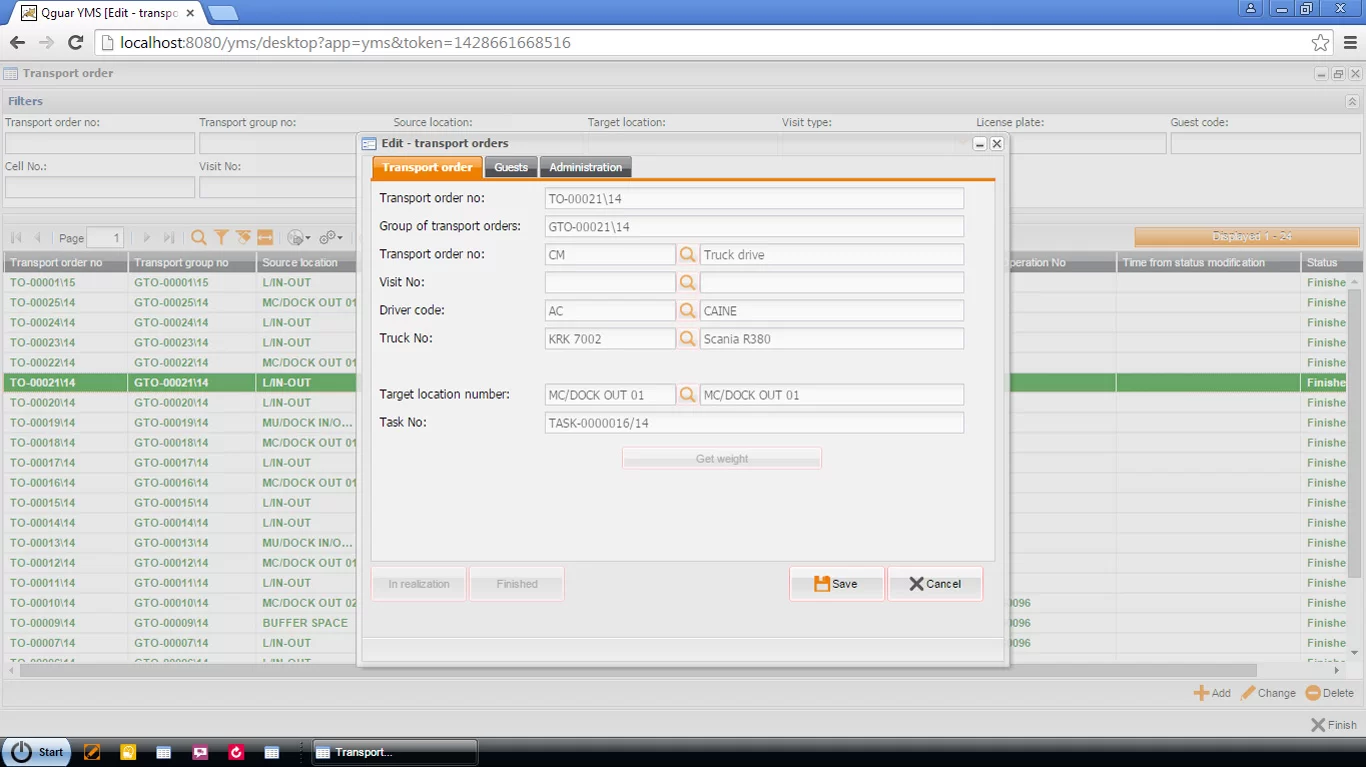
Loading and unloading management
Weight registration
Optimization of vehicle utilisation
Minimization of delivery and shipment accumulations
PLM Dynamics Offers Innovative Solutions That Will Positively Impact Any Industry
Deploy the most advanced Yard Management System and transform the way you manage vehicles, resources, and logistics operations. Our team brings extensive experience in digitalizing and optimizing logistics processes from needs analysis and implementation to system integration, user training, and long-term support.
Contact us today to discover how Qguar YMS can elevate your logistics, boost operational efficiency, and deliver security at every level of your business.






{kind=link}
{kind=link}
{kind=link}
{kind=link}